麻省理工学院的研究人员引入了一种新技术,使动画电影和视频游戏中的英雄和反派角色的动画更具控制性。
他们的方法生成数学函数,称为重心坐标,用于定义2D和3D形状在空间中的弯曲、拉伸和移动方式。例如,使用他们的工具的艺术家可以选择函数,使3D猫的尾巴的运动符合他们对动画猫外观的设想。
许多其他解决此问题的技术都不够灵活,只为特定动画角色的重心坐标函数提供单一选项。每个函数可能是适用于特定动画的最佳函数,也可能不是。艺术家每次想要尝试稍微不同的外观时,都必须从头开始使用新方法。
这项技术的主要作者Ana Dodik表示:“作为研究人员,我们有时会陷入解决艺术问题的循环中,而不与艺术家进行咨询。艺术家关心的是灵活性和最终产品的外观。他们不关心算法在幕后解决的偏微分方程。”
除了艺术应用之外,这项技术还可以应用于医学成像、建筑、虚拟现实,甚至作为计算机视觉中的工具,帮助机器人了解物体在现实世界中的运动方式。
该研究的主要作者Ana Dodik与南加州大学维特比工程学院的助理教授Oded Stein、麻省理工学院计算机科学与人工智能实验室(CSAIL)的场景表示组负责人、电气工程与计算机科学(EECS)助理教授Vincent Sitzmann以及CSAIL几何数据处理组的负责人、EECS副教授Justin Solomon共同撰写了这篇论文。该研究最近在SIGGRAPH Asia上进行了展示。
当艺术家为2D或3D角色制作动画时,一种常见的技术是用线段或三角形连接的简化点集(称为cage)围绕角色的复杂形状。动画师通过拖动这些点来移动和变形cage内的角色。关键技术问题是确定当修改cage时角色如何移动;这种运动由特定重心坐标函数的设计决定。
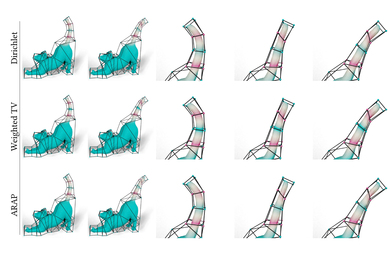
传统方法使用复杂的方程来寻找基于cage的运动,以避免在形状被拉伸或弯曲到极限时产生的折痕。但是,关于“平滑度”的艺术概念如何转化为数学的概念有很多不同的观点,每个观点都会导致不同的重心坐标函数集。
麻省理工学院的研究人员寻求一种通用方法,使艺术家能够在任何形状的平滑度能量中设计或选择。然后艺术家可以预览变形并选择看起来最符合他们口味的平滑度能量。
尽管灵活设计重心坐标是一个现代的想法,但基本的重心坐标数学构造可以追溯到几个世纪前。重心坐标是由德国数学家奥古斯特·莫比乌斯于1827年引入的,它规定了形状的每个角落对形状内部的影响。
在三角形中,这是莫比乌斯在他的计算中使用的形状,重心坐标很容易设计 – 但是当cage不是三角形时,计算变得复杂。为复杂的cage制作重心坐标特别困难,因为对于复杂的形状,每个重心坐标必须满足一组约束条件,同时尽可能平滑。
与过去的工作不同,该团队使用了一种特殊类型的神经网络来模拟未知的重心坐标函数。神经网络是基于人脑的松散模型,使用许多相互连接的节点处理输入。
虽然神经网络通常用于模仿人类思维的人工智能应用中,但在这个项目中,神经网络用于数学原因。研究人员的网络架构知道如何输出满足所有约束条件的重心坐标函数。他们将约束条件直接构建到网络中,因此当它生成解决方案时,它们总是有效的。这种构造帮助艺术家设计有趣的重心坐标,而不必担心问题的数学方面。
Dodik表示:“困难的部分是构建约束条件。标准工具无法完全解决问题,所以我们确实需要打破常规思维。”
研究人员借鉴了莫比乌斯近200年前引入的三角形重心坐标。这些三角形坐标计算简单且满足所有必要的约束条件,但现代cage比三角形复杂得多。
为了弥合差距,研究人员的方法使用重叠的虚拟三角形覆盖形状,这些虚拟三角形连接cage外部的三个点。
她说:“每个虚拟三角形定义了一个有效的重心坐标函数。我们只需要一种将它们组合起来的方法。”
这就是神经网络的作用。它预测如何组合虚拟三角形的重心坐标,以生成更复杂但平滑的函数。
使用他们的方法,艺术家可以尝试一个函数,查看最终动画,然后调整坐标以生成不同的运动,直到达到他们想要的动画效果。
Dodik表示:“从实际角度来看,我认为最大的影响是神经网络给你带来了以前没有的很多灵活性。”
研究人员演示了他们的方法如何生成比其他方法更自然的动画,例如猫的尾巴在移动时平滑弯曲,而不是在cage的顶点附近僵硬折叠。
未来,他们希望尝试不同的策略来加速神经网络。他们还希望将这种方法构建成一个交互界面,使艺术家能够实时轻松地迭代动画。
这项研究部分资助来自美国陆军研究办公室、美国空军科学研究办公室、美国国家科学基金会、CSAIL学习系统计划、MIT-IBM Watson AI实验室、丰田-CSAIL联合研究中心、Adobe Systems、Google Research奖、新加坡国防科技局和亚马逊科学中心。



