通过3D喷墨打印系统,工程师可以制造具有软硬组件的混合结构,例如机器人夹具,它们足够强大以抓住重物,但又足够柔软以安全地与人类互动。
这些多材料3D打印系统利用数千个喷嘴沉积微小的树脂液滴,然后用刮刀或滚筒平滑,并用紫外线光固化。但是,平滑过程可能会挤压或涂抹缓慢固化的树脂,从而限制可以使用的材料类型。
麻省理工学院(MIT)、MIT的分支机构Inkbit和苏黎世联邦理工学院(ETH Zurich)的研究人员开发了一种新的3D喷墨打印系统,可以与更广泛的材料范围一起使用。他们的打印机利用计算机视觉自动扫描3D打印表面,并实时调整每个喷嘴沉积的树脂量,以确保没有区域有过多或过少的材料。
由于它不需要机械部件来平滑树脂,这种非接触式系统可以与比传统3D打印中使用的丙烯酸酯固化更慢的材料一起使用。一些固化速度较慢的材料化学成分可以提供比丙烯酸酯更好的性能,例如更大的弹性、耐久性或寿命。
此外,自动系统可以在不停止或减慢打印过程的情况下进行调整,使这台生产级打印机比可比的3D喷墨打印系统快约660倍。
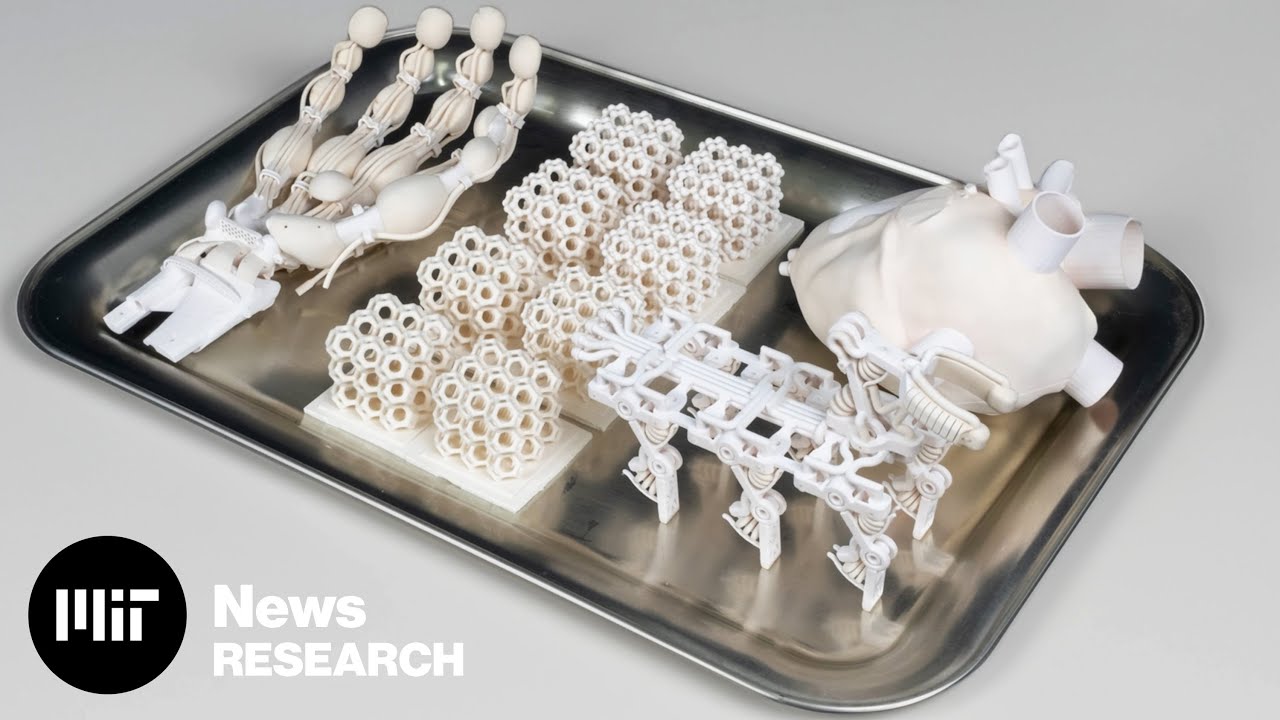
研究人员使用这台打印机制造了结合了软硬材料的复杂机器人设备。例如,他们制造了一个完全由3D打印的机器人夹具,形状像人手,由一组加固但柔软的肌腱控制。
“我们的关键洞察力在于开发一种机器视觉系统和完全主动的反馈循环。这几乎就像给打印机配备了一双眼睛和一颗大脑,眼睛观察正在打印的内容,然后机器的大脑指导它下一步应该打印什么,”麻省理工学院电气工程和计算机科学教授、麻省理工学院计算机科学与人工智能实验室(CSAIL)计算设计与制造组的联合通讯作者Wojciech Matusik说。
他在论文中与首席作者Thomas Buchner(苏黎世联邦理工学院博士生)、联合通讯作者Robert Katzschmann(麻省理工学院机器人学助理教授,苏黎世联邦理工学院软体机器人实验室负责人)以及苏黎世联邦理工学院和Inkbit的其他人合作。这项研究发表在《自然》杂志上。
无接触
这篇论文是基于研究人员在2015年推出的一种低成本多材料3D打印机MultiFab。MultiFab利用数千个喷嘴沉积微小的树脂液滴,并进行紫外线固化,实现了高分辨率的3D打印,一次最多可使用10种材料。
通过这个新项目,研究人员寻求一种无接触的过程,以扩大他们可以使用的材料范围,以制造更复杂的设备。
他们开发了一种名为“视觉控制喷射”的技术,利用四个高帧率摄像头和两个激光器快速连续扫描打印表面。摄像头在数千个喷嘴沉积微小的树脂液滴时捕捉图像。
计算机视觉系统将图像转换为高分辨率深度图,这个计算过程不到一秒钟。它将深度图与正在制造的零件的CAD(计算机辅助设计)模型进行比较,并调整沉积的树脂量,以使对象与最终结构保持一致。
自动系统可以对任何单个喷嘴进行调整。由于打印机有16,000个喷嘴,系统可以控制设备的细节。
“从几何上讲,它几乎可以打印任何你想要的多材料制品。在向打印机发送的内容方面几乎没有限制,而且所得到的产品真正是功能齐全且持久耐用的,”Katzschmann说。
该系统提供的控制水平使其能够使用蜡进行非常精确的打印,蜡被用作支撑材料,用于在物体内部创建空腔或复杂的通道网络。蜡在结构下方打印,设备制造完成后,加热物体使蜡融化并排出,留下整个物体中的开放通道。
由于系统可以自动且快速地实时调整每个喷嘴沉积的材料量,因此系统不需要将机械部件拖过打印表面以保持水平。这使得打印机可以使用固化速度更慢的材料,而这些材料会被刮刀涂抹。
优质材料
研究人员使用该系统打印了基于硫醇的材料,这种材料的固化速度比传统的丙烯酸酯材料慢。然而,硫醇基材料比丙烯酸酯更有弹性,不容易断裂。它们在更宽的温度范围内更稳定,并且在阳光照射下不会迅速降解。
“当您想要制造与真实环境互动的机器人或系统时,这些都是非常重要的特性,”Katzschmann说。
研究人员使用硫醇基材料和蜡制造了几个复杂的设备,这些设备在现有的3D打印系统中几乎不可能制造。例如,他们制造了一个功能性的、由肌腱驱动的机器人手,该手具有19个独立驱动的肌腱、带有传感器垫的柔软手指和刚性的承重骨骼。
“我们还制造了一个六足行走机器人,它可以感知物体并抓取它们,这是由于该系统能够创建软硬材料的气密接口以及结构内部的复杂通道,”Buchner说。
该团队还通过一个类似心脏的泵,集成了心室和人工心脏瓣膜,以及可以编程具有非线性材料特性的超材料来展示该技术。
“这只是个开始。您可以将许多新类型的材料添加到这项技术中。这使我们能够引入以前无法在3D打印中使用的全新材料系列,”Matusik说。
研究人员现在正在研究使用该系统打印水凝胶(用于组织工程应用)、硅材料、环氧树脂和特殊类型的耐用聚合物。
他们还希望探索新的应用领域,例如打印可定制的医疗设备、半导体抛光垫,甚至更复杂的机器人。
这项研究部分资助来自瑞士信贷、瑞士国家科学基金会、美国国防高级研究计划局和美国国家科学基金会。